






-2.png)

-3.jpg)






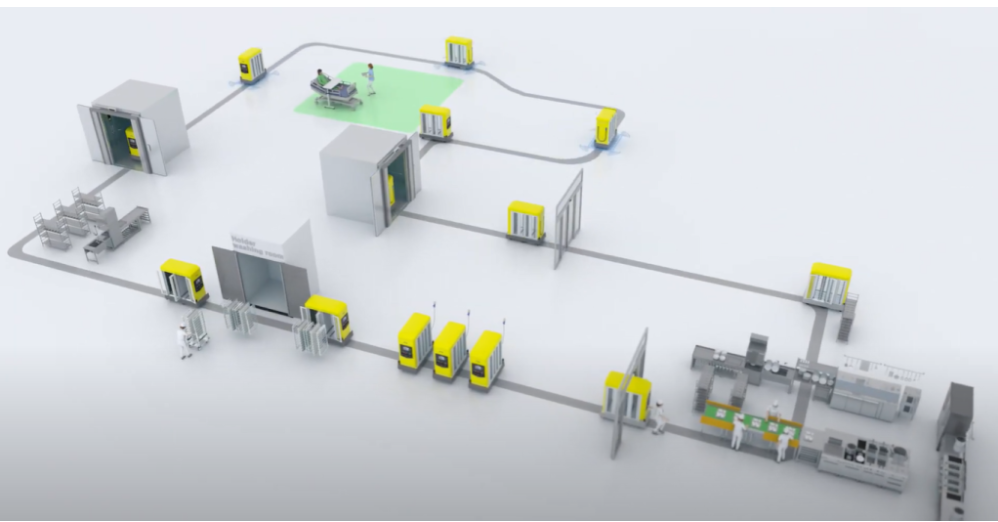
한동안 창고 및 산업 시설에서 AGV(무인 운반차)가 흔히 사용되었습니다. 이 전자 일꾼은 자재나 제품을 한 곳에서 다른 곳으로 정해진 경로를 따라 옮기는 단순한 반복 작업을 매우 효율적으로 수행하여 인간 작업자는 더 복잡한 작업을 처리할 수 있게 합니다.
이러한 무인 자동차 제조업체의 강력한 도전자가 AMR(자율 모바일 로봇)입니다. AGV는 센서, 자기 스트립 또는 전선을 사용하여 설정된 경로를 편차 없이 따라갑니다. 온보드 지능이 제한되어 있어 프로그래밍된 단순한 명령만 따를 수 있습니다.
반면 AMR은 AGV가 할 수 없는 방식으로 결정을 내릴 수 있습니다. 자율 모바일 로봇은 온보드 카메라와 센서에서 보내는 일정한 데이터 흐름을 활용해 장애물을 식별하고 우회하며 목적지까지 가장 효율적인 경로를 찾을 수 있습니다.
무인 운반차는 경로에서 장애물을 찾더라도 경로를 변경할 수는 없습니다. 물건으로 가득한 창고에서 여러 AGV가 일렬로 늘어서 차례를 기다리는 교통 체증이 발생하는 일은 드물지 않습니다. 또한 표식으로 사용되는 QR 코드와 자기 스트립은 쉽게 손상될 수 있어 자주 정비해야 합니다.
로봇 관제 시스템과 온보드 주행 기능을 갖춘 SLAM 로봇 기술이 해결책입니다.
SLAM 및 무인 운반차
SimSLAM(동시 로컬라이제이션 및 매핑)은 AGV 제조업체에 도움이 됩니다. 이러한 회사에서 SLAM 로봇 기술을 활용하여 주면 환경을 읽고 반응하는 진보된 무인 운반차를 생산할 수 있습니다.
\동시 로컬라이제이션 및 매핑이란 특정 소프트웨어나 기술을 나타낸다기보다는 주변 환경을 실시간으로 매핑하고 해당 매핑을 기준으로 자신의 위치를 계속 인식할 수 있는 시스템 기능을 나타냅니다.
SLAM을 통해 진보된 AGV는 미리 결정된 단순한 경로를 벗어나 탐색하고 보다 독립적이고 효율적으로 작동할 수 있습니다. SLAM 지원 무인 운반차는 바닥의 가이드라인을 따라 미리 결정된 방향으로 이동하도록 제한되지 않습니다. 이런 유연성과 효율성 덕분에 SLAM 기술은 자율 모바일 로봇에서 무인 항공기, 진공 청소기에 이르는 다양한 자율 차량에서 사용됩니다.

AGV 제조업체를 위한 솔루션에서 로컬라이제이션 및 매핑은 중요한 부분이지만 주행도 마찬가지로 중요합니다. 로봇이 위치와 주변 환경을 인식하는 것도 중요하지만 혼잡한 환경에서 효율적으로 주행하는 것도 못지않게 중요합니다.
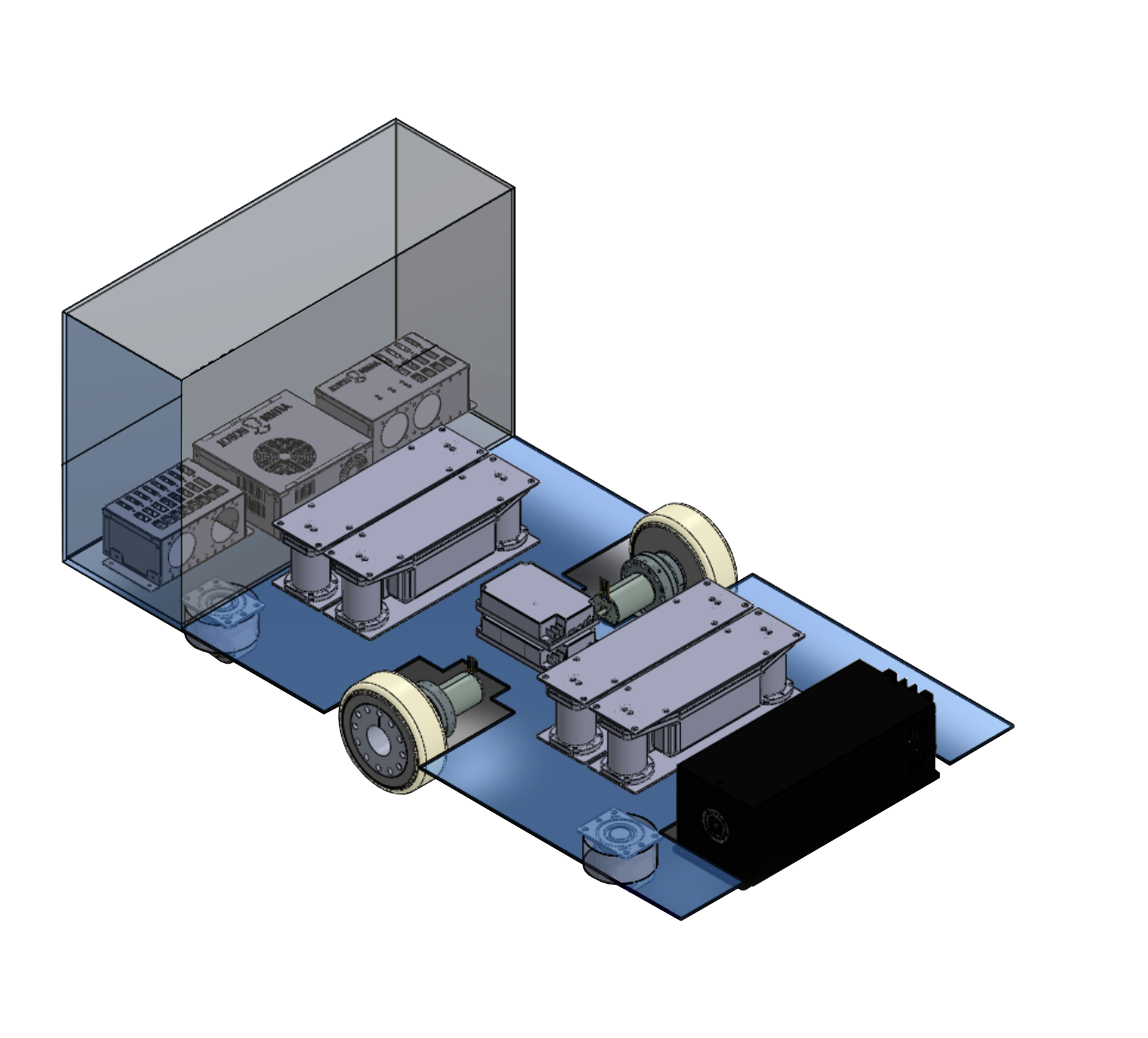
AGV 제조업체에는 유진로봇에서 제공하는 것과 같은 SLAM과 주행이 통합된 시스템이 유용합니다. 유진은 Hantech 및 BH Systems 등의 제조업체와 긴밀히 협력하여 유진의 SLAM 및 주행 솔루션을 갖춘 진보된 AGV 및 AMR을 생산합니다.
유진의 SLAM 및 주행 솔루션은 널리 사용되는 LiDAR 센서와 연동되어 AGV가 까다로운 환경에서 정확한 맵을 생성하고 계속 위치를 인식하고 목적지까지 효율적으로 이동하도록 지원합니다.




 유진로봇 뉴스레터 구독하기
유진로봇 뉴스레터 구독하기
