






-2.png)
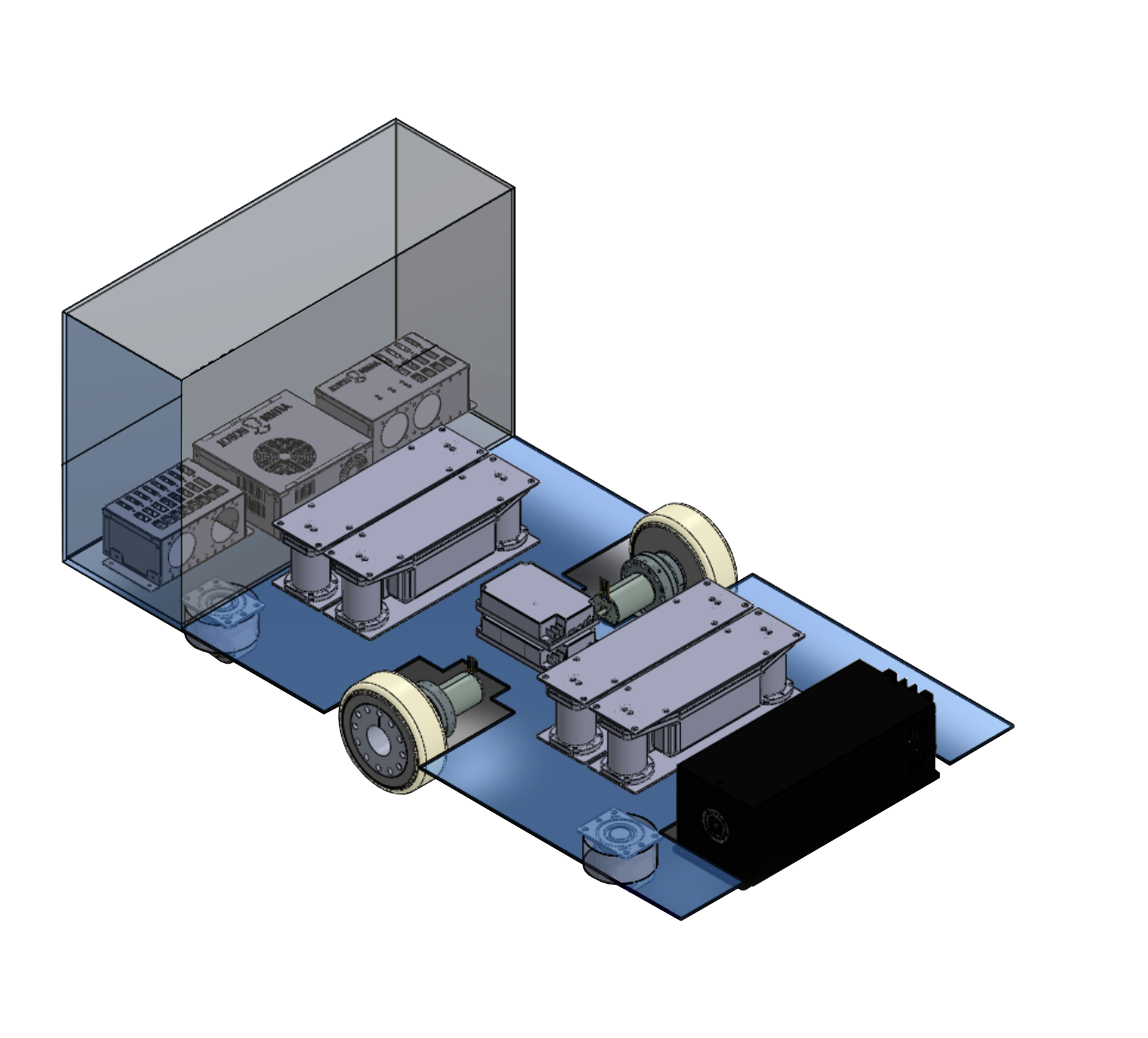






GoCart180
최대 적재량 180 kg으로 헬스 케어, 요양 시설, 공장 내 기존 설비 시스템과 인터페이스 모듈 적용하여 사용할 수 있는 컴팩트한 사이즈의 로봇입니다.
자율주행 물류로봇 GoCart 시리즈
최대 적재량 180 kg으로 헬스 케어, 요양 시설, 공장 내 기존 설비 시스템과 인터페이스 모듈 적용하여 사용할 수 있는 컴팩트한 사이즈의 로봇입니다.

최대 적재량 250 kg으로 GoCart180 보다 더 무거운 제품 이송이 가능하며 공장, 물류창고, 병원 시설 등에 활용 가능합니다.

고객의 현장 환경에 맞춰 팔레트 및 리프트 모듈 등의 상부 장치를 장착할 수 있으며, 최대 적재량 500 ~ 1000 kg으로 고중량 이송이 필요한 공장이나 물류창고 등에서 효과적으로 활용할 수 있습니다.

고객의 현장 환경에 맞춰 팔레트 및 리프트 모듈 등의 상부 장치를 장착할 수 있으며, 최대 적재량 1500 kg으로 고중량 이송이 필요한 공장이나 물류창고 등에서 효과적으로 활용할 수 있습니다.
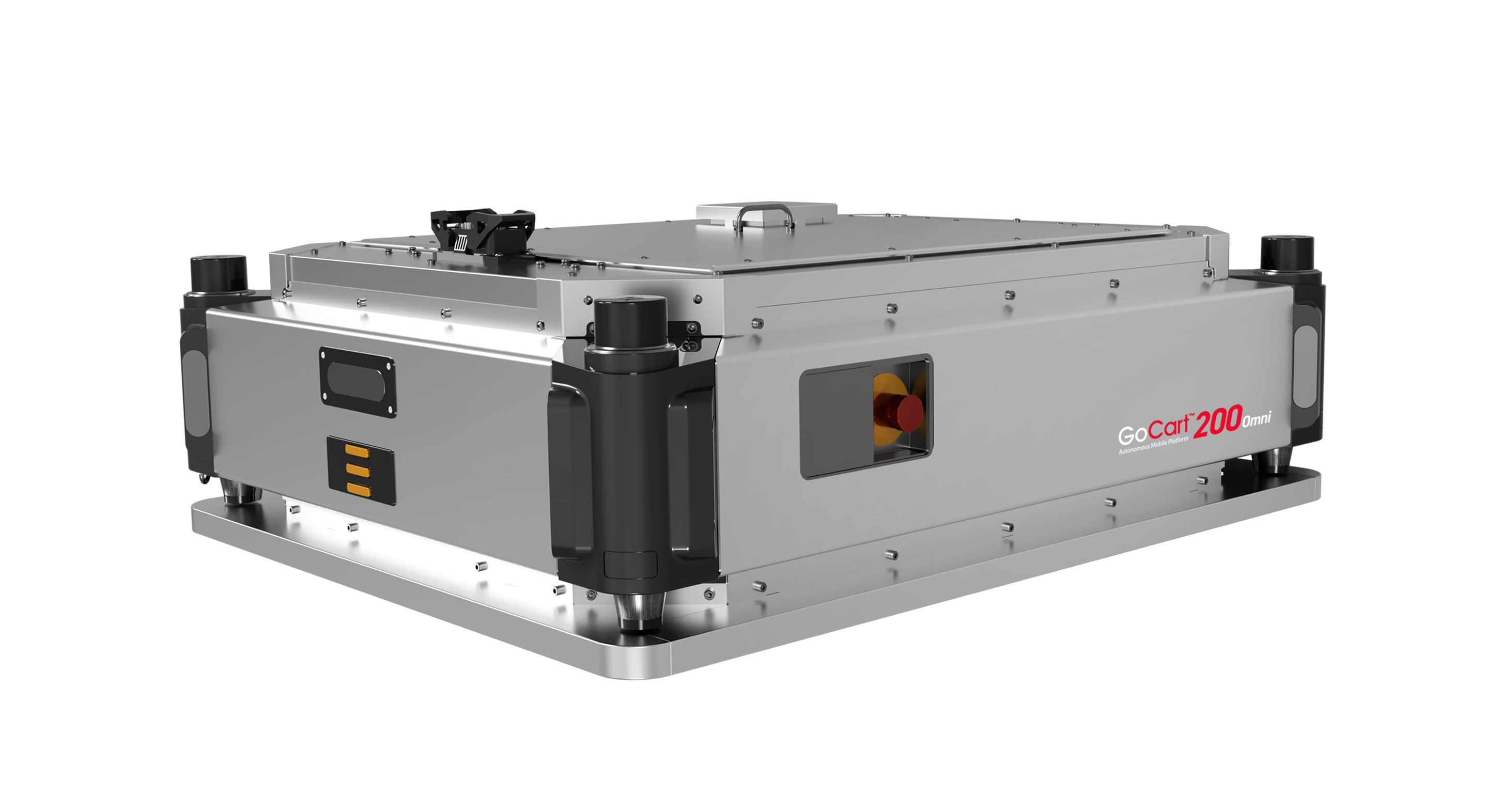
옴니휠(Omni Directional Driving) 기반으로 좁은 공간에서 자유로운 이동과 정확한 주차가가능합니다. 최대 적재량 200 kg로 의료분야, 병원 시설에서 물류 이송 자동화를 구현하는 로봇입니다.

옴니휠(Omni Directional Driving) 기반으로 좁은 공간에서 자유로운 이동과 정확한 주차가가능합니다. 최대 적재량 300 kg로 의료분야, 병원 시설에서 물류 이송 자동화를 구현하는 로봇입니다.
다중 로봇 제어시스템(FMS) 연동
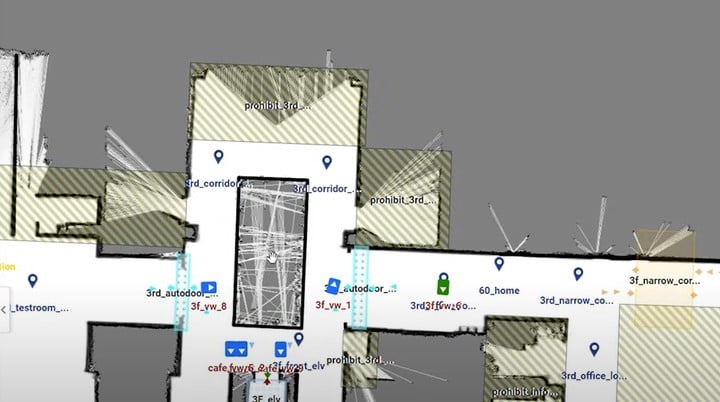
YUJIN 3D LiDAR 및 3D SLAM 기반 주행
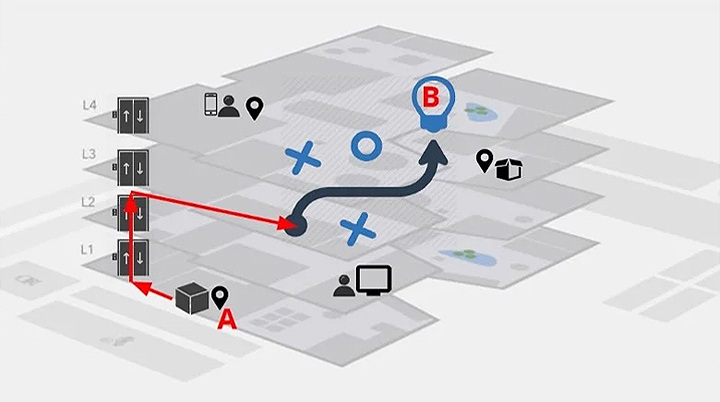
FMS를 통한 스마트 자동문 및 엘리베이터 인터페이스 지원
PL-D 레벨 안전 시스템(ISO 13482)
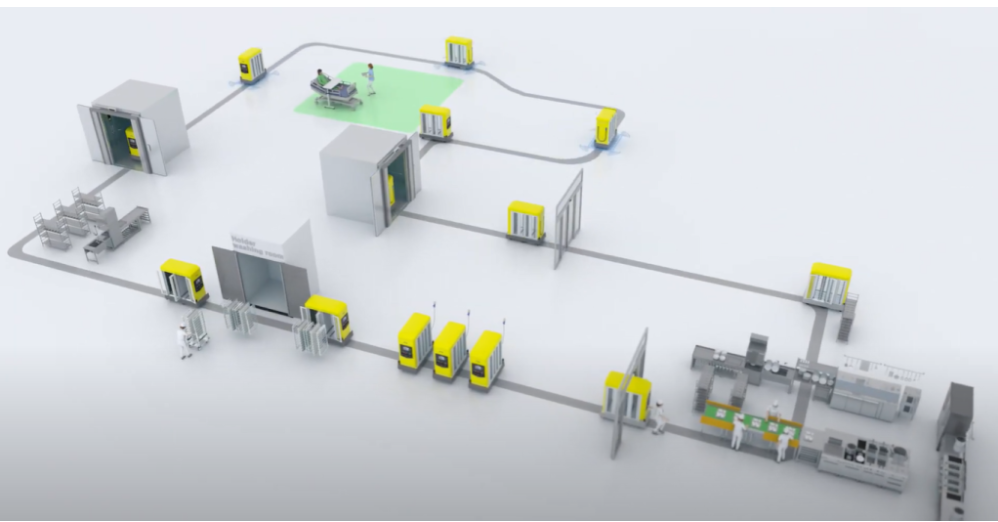
유진 로봇 관제 시스템(Fleet Management System)은 서버에서 실행되는 유진로봇의 중앙 집중식 다중 로봇 관리 소프트웨어 입니다. FMS는 다층 빌딩에서 GoCart AMR 로봇의 운영을 관리하고, GUI를 통해 예약된 작업을 최적의 로봇에게 업무할당을 지원하며, 운행 중 교착 상태와 병목 현상을 방지할 뿐 아니라 다른 IoT 시스템(MES, ERP 등)과 연결하여 필요에 따라 운영범위를 확장할 수 있습니다.












운반
로봇
물류자동화
운반
로봇
물류자동화
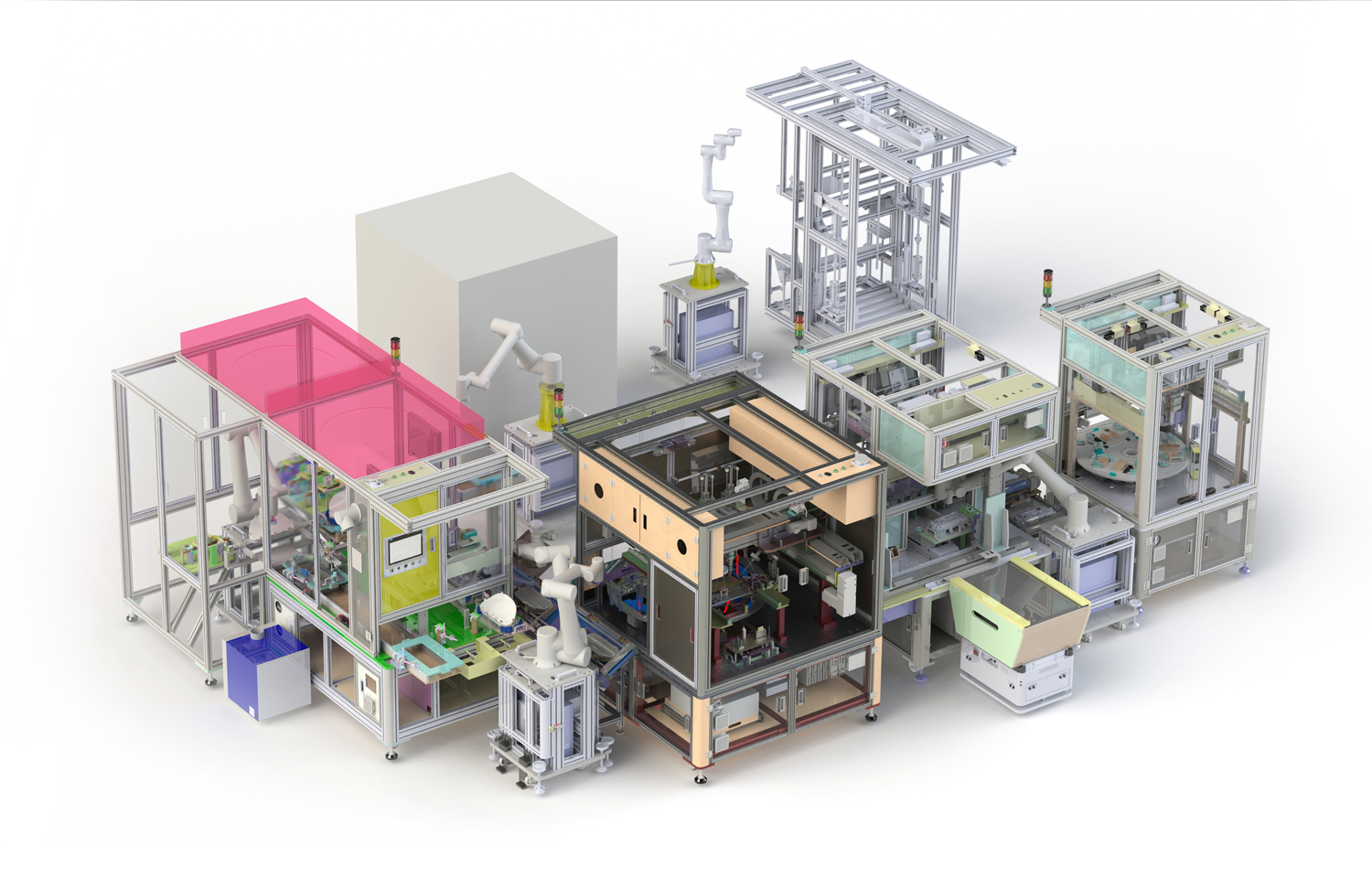
로보타이제이션 솔루션
물류자동화
창고자동화
로보타이제이션 솔루션
헬스케어
물류자동화
창고자동화
물류자동화
창고자동화
물류자동화
창고자동화
물류자동화
창고자동화
운반
창고자동화
운반
로봇
물류자동화
제조
운반
로봇
물류자동화
제조
운반
로봇
물류자동화
운반
헬스케어
로봇
물류자동화
제조
운반
물류자동화
운반
헬스케어
로봇
더 많은 사례보기

 유진로봇 뉴스레터 구독하기
유진로봇 뉴스레터 구독하기
