






-2.png)

-3.jpg)






.jpg?width=1245&height=500&name=1%20(2).jpg)
산업 로봇계는 최초의 산업 로봇 Unimate가 General Motors의 조립 라인에 사용된 1950년대 후반부터 크게 진보해왔습니다. 오늘날 공장, 창고, 병원 등에서 인간과 나란히 작업하는 모든 유형의 로봇을 발견하는 것은 흔히 있는 일입니다. 로봇 기능이 외팔인 유압 동력의 Unimate에서 진보함에 따라, 작업장의 로봇을 제어하는 안전 관련 고려사항 역시 진화해왔습니다.
진화하는 로봇 안전 표준
20세기 후반 수십 년 동안 내내 로봇은 여전히 스테이셔너리로 머물렀습니다. 가동성과 역량은 성장했지만, 케이지 뒤에 갇히거나 인간에게서 멀리 떨어져 차단될 수 있었습니다. 로봇의 역할은 따분하고 더러우며 위험한 작업을 맡아 인간 근로자의 부담을 더는 것이었습니다. 인간의 일은 그 길을 비켜주는 것이었습니다.
1987년, 미국 연방 직업안전·보건국은 로봇 안전을 위한 지침을 발간했습니다. 해당 문서는 도입부에 산업 로봇 작동 방식에 대한 다음 설명을 포함합니다. 로봇은 로봇이 작업하는 작업 영역으로 알려진 물리적 영역 내에서 작업을 수행합니다. 이 작업 영역은 프로그래밍 가능한 로봇이 움직일 수 있는 모든 영역의 크기입니다.” 그 당시, 대부분의 로봇 부상은 인간이 작업 영역을 침범하고 강력한 로봇 팔을 방해했기 때문에 발생했습니다. 문서에 서술된 대로 적절한 안전 조치는 작동 중 인간 근로자부터 로봇을 분리하기 위한 울타리와 장벽을 포함합니다.

국제 로봇 연맹에 따르면 미국에 310,000개 이상의 산업 로봇이 있으며 상당수가 스테이셔너리 로봇의 카테고리에 속한다고 합니다. 하지만, 작업장 로봇의 증가 수는 말 그대로 전진 중입니다.
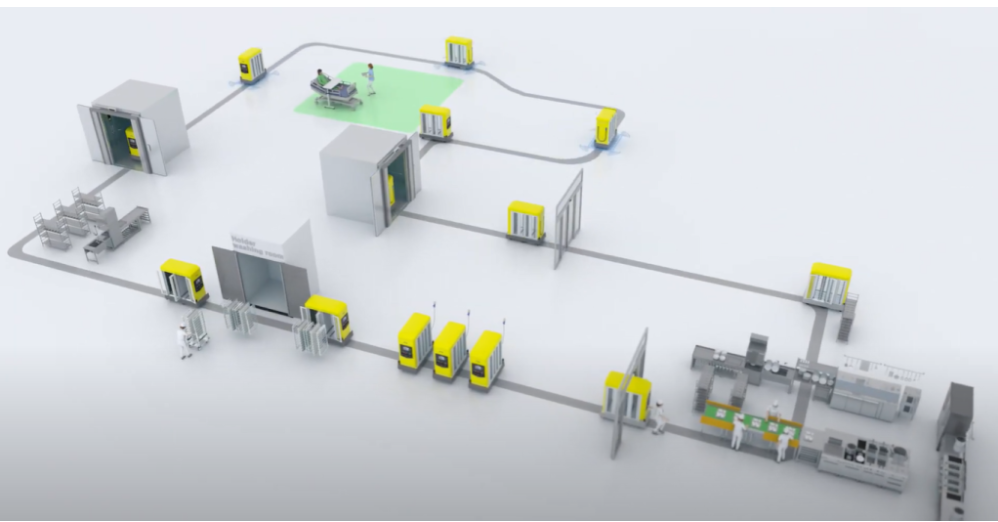
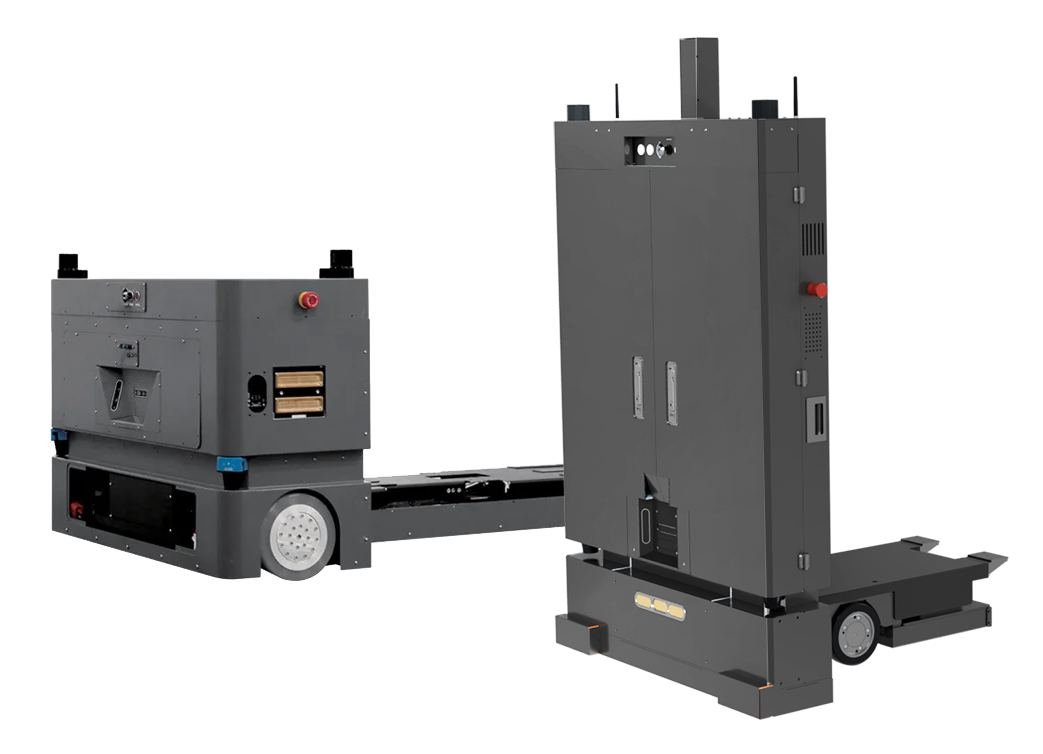
지난 10년 특히 무인 운반차(AGV) 및 자율 모바일 로봇(AMR)에서 급속하게 성장하는 것으로 보였습니다. 이러한 로봇은 제조, 의료, 소매 운송 등의 분야에서 인간들 사이에서 심지어 인간과 함께 작동하도록 설계되었습니다.
국립 미국 연방 직업안전·보건국은 “근로자들이 케이지를 사용하여 로봇을 작동하는 것에서 물리적으로 벗어나도록 하는 전통적인 산업 로봇을 위한 로봇 제어 기술과 기타 엔지니어링 제어는 새로운 유형의 로봇에는 더 이상 쓸모가 없습니다.”라고 언급합니다. “위험 평가 방식과 로봇 제어 전략은 반드시 이러한 새로운 유형의 로봇을 위해 개발되고 테스트되어야 합니다.

안전상의 우려에 대응하여, NIOSH는 직업 로봇 연구를 위한 센터를 설립하여 “오늘날 로봇을 사용, 착용하거나 로봇과 가까이 일하는 근로자를 위한 안전을 해결합니다.
로봇 제조업체와 NIOSH가 안전상의 우려를 대처하는 한 가지 방법은 지속적으로 AMR도 포함하도록 진화하는 산업 표준을 준수하는 것입니다. 자동화 발전 협회(A3)는 최근 자율 및 협동 로봇을 다루기 위한 국제 로봇 표준을 업데이트했습니다.
모바일 로봇의 급속히 발전하는 기능으로 인해 산업 모바일 로봇(IMR)과 플리트(IMRF)는 미래에 점점 더 흔한 유형의 로봇 애플리케이션이 될 것입니다. 생산성 측면에서 이러한 진보가 성공을 거두기 위해, 모바일 로봇 애플리케이션 주변의 인간 근로자에 대한 안전은 반드시 보장되어야 합니다.

로봇 안전 센서
초기 지침이 로봇으로부터 인간을 멀리하는 방법을 다룬 한편, A3과 NIOSH 지침은 이제 모두 공유된 공간 전체를 로봇이 이동할 때 인간에게서 로봇을 멀리하는 방법에 대한 표준을 포함합니다. AMR 제조업체들이 안전을 보장하는 주된 방법 중 하나는 외수용 센서를 사용하는 것입니다. 이러한 센서를 통해 로봇이 외부 환경에서 무슨 일이 발생하는지 파악하고 적절하게 반응할 수 있습니다. 센서는 작업을 수행하는 대로 AGV 또는 AMR의 눈과 귀처럼 행동합니다. 로봇 센서는 무언가와 접촉했을 때 멈출 수 있는 기능을 로봇에게 제공하는 터치 센서와 로봇이 접촉하지 않고 장애물을 감지하고 피할 수 있도록 하는 범위 센서를 포함하는 여러 형태를 취할 수 있습니다.
이전 카테고리에서 가장 강력한 것은 LiDAR 센서입니다. LiDAR는 빛 감지 및 범위 지정을 의미하며 AMR에 의해 폭넓게 사용되어 장애물의 위치를 찾아내고 파악하며 움직임을 추적합니다. LiDAR는 레이저 펄스를 사용하여 물체를 감지하고 그 크기와 로봇으로부터의 거리를 추정합니다. 이는 빛 대신 전파를 사용하는 RADAR와 유사한 방식으로 작동하지만 AMR에서 사용하기에 더 빠르고 더 정확한 도구가 될 것으로 입증되었습니다. 이는 더 규모가 작거나 예측 가능한 레이아웃이 적은 환경에 특히 그렇습니다.
LiDar의 가장 최신 개발품은 유진로봇에서 나왔습니다. 유진로봇은 매핑, 물체 감지, 주행 및 기타 로봇 애플리케이션(특히 AMR에서)에 최적화된 자체 YUJIN 3D LiDAR를 만들었습니다. 유진 3D LiDAR에는 수평으로 360도 및 수직으로 80도인 시야 범위가 가능한 네 가지의 선택 가능한 스캐닝 모드가 있습니다.
SLAM 및 주행 기술과 조합하여 사용하면 LiDAR는 자율 모바일 로봇이 다양한 환경에서 장애물과 작업자를 피하도록 조정하여 안전하게 이동할 수 있는 기능을 제공합니다.

함께 안전하게 작업하기
작업장의 로봇이 생산성과 심지어 안전성에도 기여했다는 데에는 의심할 여지가 없습니다. 하지만 AMR과 협업 로봇이 전 세계적으로 창고, 공장 및 병원에서 일반적인 것이 되어감에 따라, 로봇이 작업 시 인간 근로자를 안전하게 지키는 데 필요한 도구를 장착하도록 하는 것은 훨씬 더 중요합니다.




 유진로봇 뉴스레터 구독하기
유진로봇 뉴스레터 구독하기
