






-2.png)

-3.jpg)







LiDAR 센서는 자동차 산업에서 아주 흔히 사용되지만 자율 모바일 로봇에서도 장애물을 찾거나 식별하고 자신의 이동을 추적하는 데 폭넓게 사용됩니다. 하지만 “LiDAR 센서란 무엇인가요?”란 질문에 자세히 답하기 전에 먼저 멀리 있는 물체를 추적하는 데 가장 흔히 사용되는 센서인 RADAR를 이해하는 것이 중요합니다.
RADAR 센서는 전파를 사용하여 물체를 감지하고 물체의 크기와 거리를 측정합니다. 이러한 센서는 파동 또는 펄스를 보내고, 파동이 먼 곳의 물체를 때릴 때 일부는 산란되고 일부는 센서 쪽으로 반사됩니다. 센서에서는 펄스가 돌아오는 데 걸리는 시간을 사용하여 물체의 거리를 결정합니다.
RADAR는 나름대로 효율적이지만 한계가 있습니다. 먼저 RADAR 센서는 낮은 주파수와 긴 파장에서 먼 거리의 물체를 추적하는 데 적합하지만 비좁은 구역에서는 덜 효율적입니다. 몇 미터 미만의 짧은 거리에서는 센서의 정확도가 떨어지므로 안정성이 덜합니다. 상업 또는 산업 환경의 실내에서 사용하려면 또 다른 옵션이 필요합니다.
Enter LiDAR.
LiDAR 센서란? LiDAR는 Light Detection and Ranging을 가리키며 RADAR에서 전파를 사용하는 것과 같은 방식으로 레이저 펄스를 사용합니다. 빛이 전파보다 더 빠르고 높은 주파수로 이동하므로 LiDAR 센서는 근처 물체를 감지하고 크기를 재는 데 더욱 효율적입니다.
LiDAR는 주파수가 더 높아서 보다 많은 펄스가 전송 및 반송되므로 다른 센서보다 많은 데이터가 수신됩니다. 이와 같이 고주파 광 펄스를 사용하기 때문에 D-ToF(Direct Time of Flight)라고 하며 이 기술 덕분에 LiDAR가 다른 센서와 차별화됩니다.
D-ToF 기술은 물체의 주변 환경에 대한 데이터, 이를테면 x, y, z 좌표, 거리 등을 제공합니다. 이 기술을 통해 모바일 로봇이 비좁은 장소를 지날 때 LiDAR 센서를 사용하여 장애물의 너비를 추정하고 근접 거리를 계산합니다. 같은 방법으로 무인 자동차는 LiDAR를 사용하여 좁은 공간에서 평행 주차하고 실내용 산업 로봇은 공간에서 거의 오류 없이 자신의 위치를 찾을 수 있습니다.

거리를 간단히 계산하는 것 외에 LiDAR 센서는 근처 물체에서 받는 정보를 사용하여 해당 물체의 3D 스캔 및 3D 맵핑을 정확하게 수행합니다. LiDAR 센서를 사용하는 모바일 로봇은 장애물을 감지하고 자신의 위치를 조정할 수 있을 뿐 아니라 이 3D 스캔과 3D 맵핑 덕분에 물체를 식별할 수도 있습니다. 그런 다음 로봇은 LiDAR 센서의 이 정보를 사용하여 속도와 경로를 조정합니다. LiDAR 센서가 SLAM 및 주행 기술과 결합되면 자율 모바일 로봇이 다양한 환경에서 장애물과 작업자를 피하도록 조정하여 안전하게 이동할 수 있는 기능을 제공합니다.
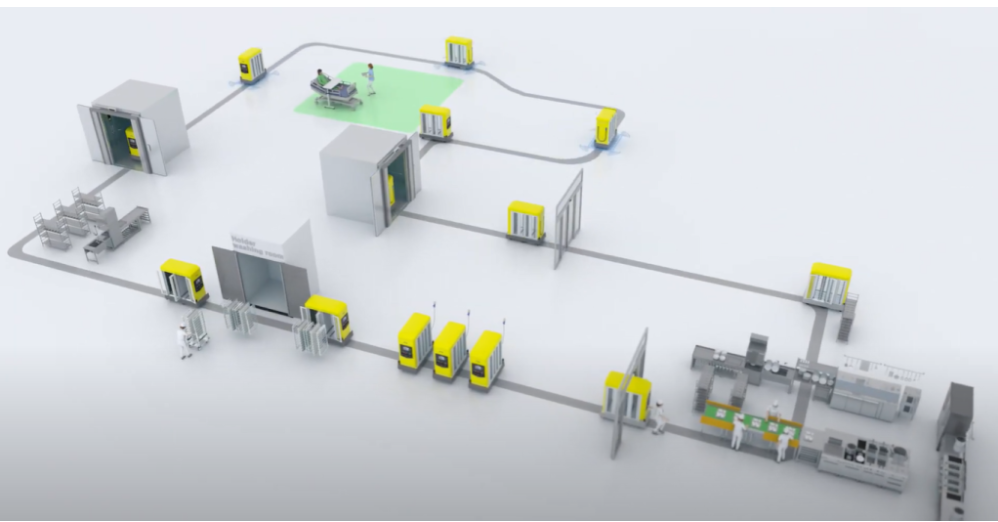
산업 시설, 창고, 병원 등에서 사용되는 자율 모바일 로봇을 비롯한 자동 운송 시스템에는 다른 물체를 기준으로 자신의 위치를 감지하는 센서가 필요합니다. 이를 통해 AMR은 서로 충돌하거나 작업 흐름에 지장을 주거나 작업자에게 부상을 입힐 위험을 막을 수 있습니다.
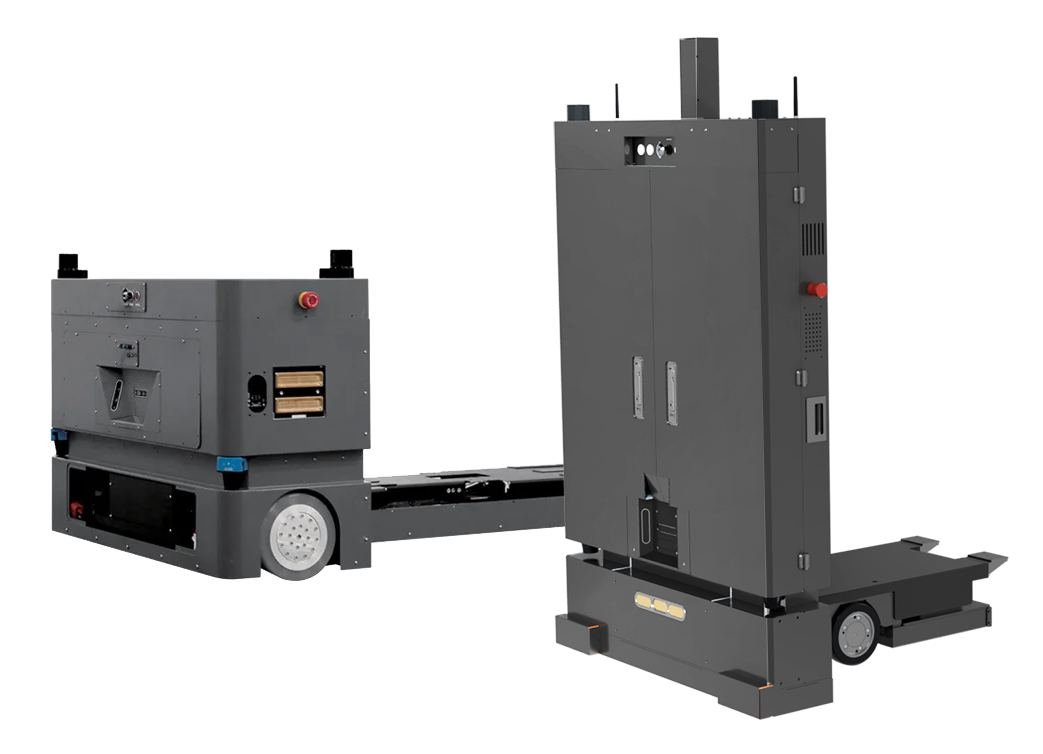
LiDAR 센서를 사용하는 모바일 로봇은 작업자로 붐비는 좁은 창고 통로를 안전하게 주행하여 부상이나 제품 손상을 일으킬 수 있는 충돌을 방지할 수 있습니다. 병원에서는 유진로봇의 GoCart 시리즈와 같은 자율 모바일 로봇을 사용하여 1층 약국에서 5층의 간호사실로 의약품을 안전하게 운반할 수 있습니다.
유진로봇의 YRL 시리즈 LiDAR 센서는 넓은 시야를 제공합니다. 시야란 센서가 적용되는 각도를 나타내며 YRL LiDAR 센서는 적용 범위가 가로는 270도, 세로는 최대 90도입니다. 창고, 공장, 병원 등 실내 환경에서 사용되는 로봇의 경우 이와 같이 적용 범위가 넓으면 최적입니다. 시야가 넓으면 있을 수 있는 장애물을 더 많이 식별할 수 있고 주변 영역도 더 잘 매핑하기 때문입니다. LiDAR 센서의 실내 자율 모바일 로봇의 핵심 구성품입니다. 물체와 장애물을 감지하고 대처하는 이 센서의 기능은 탁월합니다.




 유진로봇 뉴스레터 구독하기
유진로봇 뉴스레터 구독하기
