




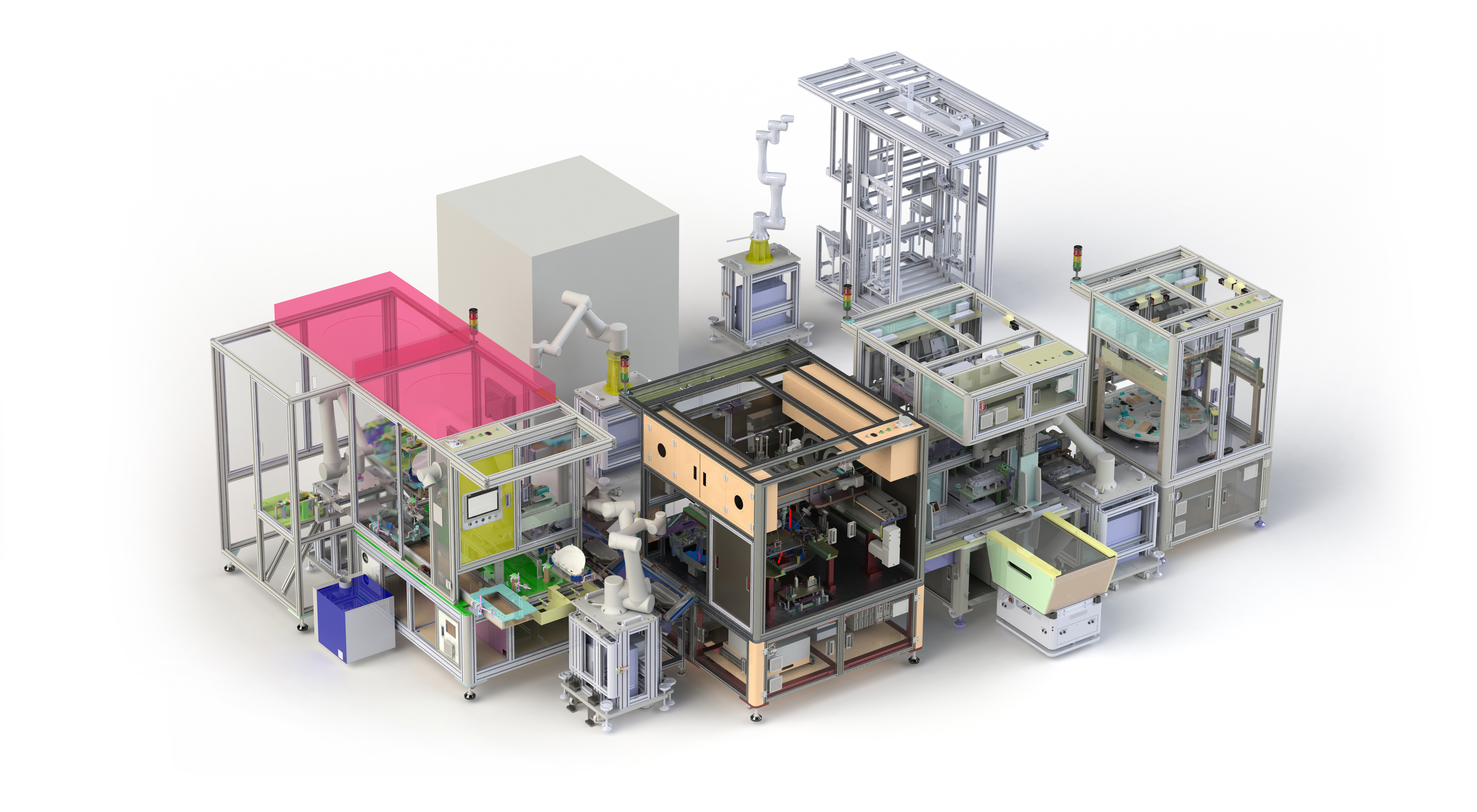





Smart Factory Assembly Automation


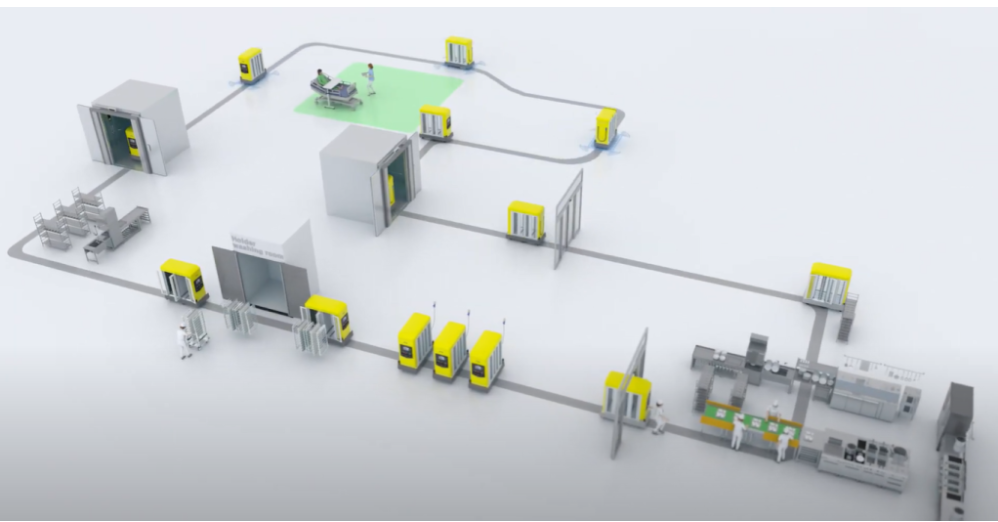
Yujin Robot's Robotization Solution is a self-driving one-stop solution for producing its own AMR, retrofitting existing AGVs and manual equipment into self-driving AMR, and basic and advanced automation of industrial mechanical equipment. It consists of solutions for factory automation or warehouse automation, including training consulting, layout design, and technical support.
Based on our self-developed 3D LiDAR, SLAM, Navigation Controller, Safety Controller and robot control system (FMS, Fleet Management System), we increase customer convenience and efficiency with a unique and differentiated autonomous driving solution.
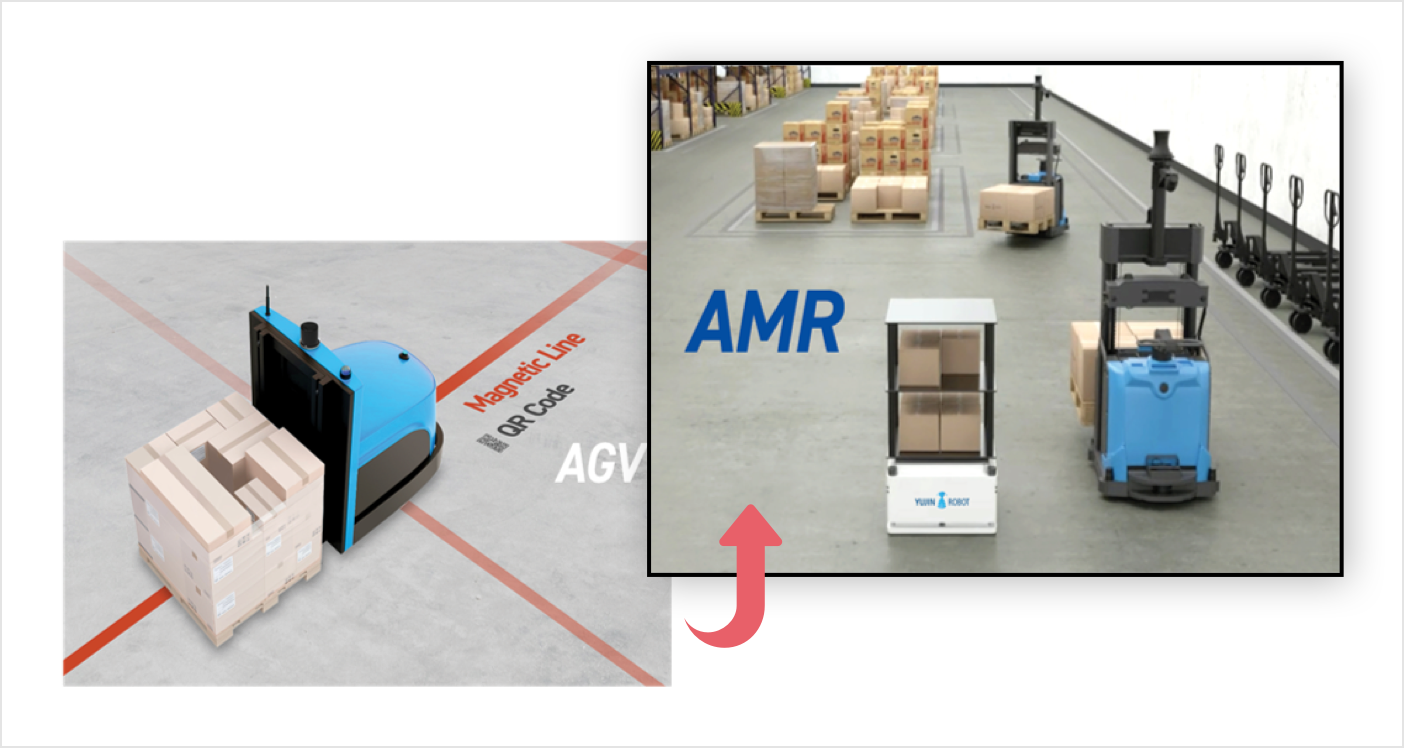
One-stop solution based on autonomous driving technology for producing your own AMR

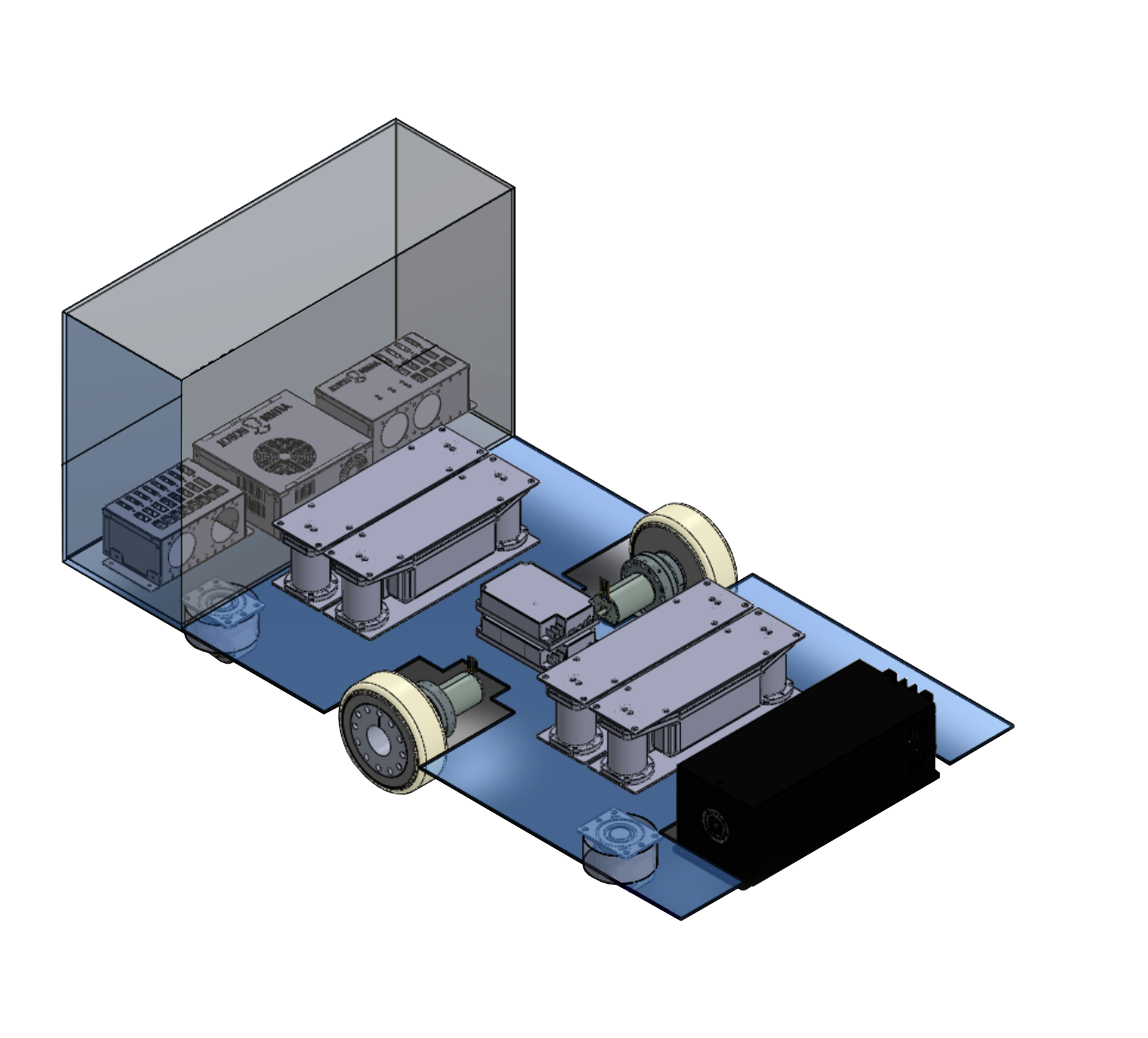
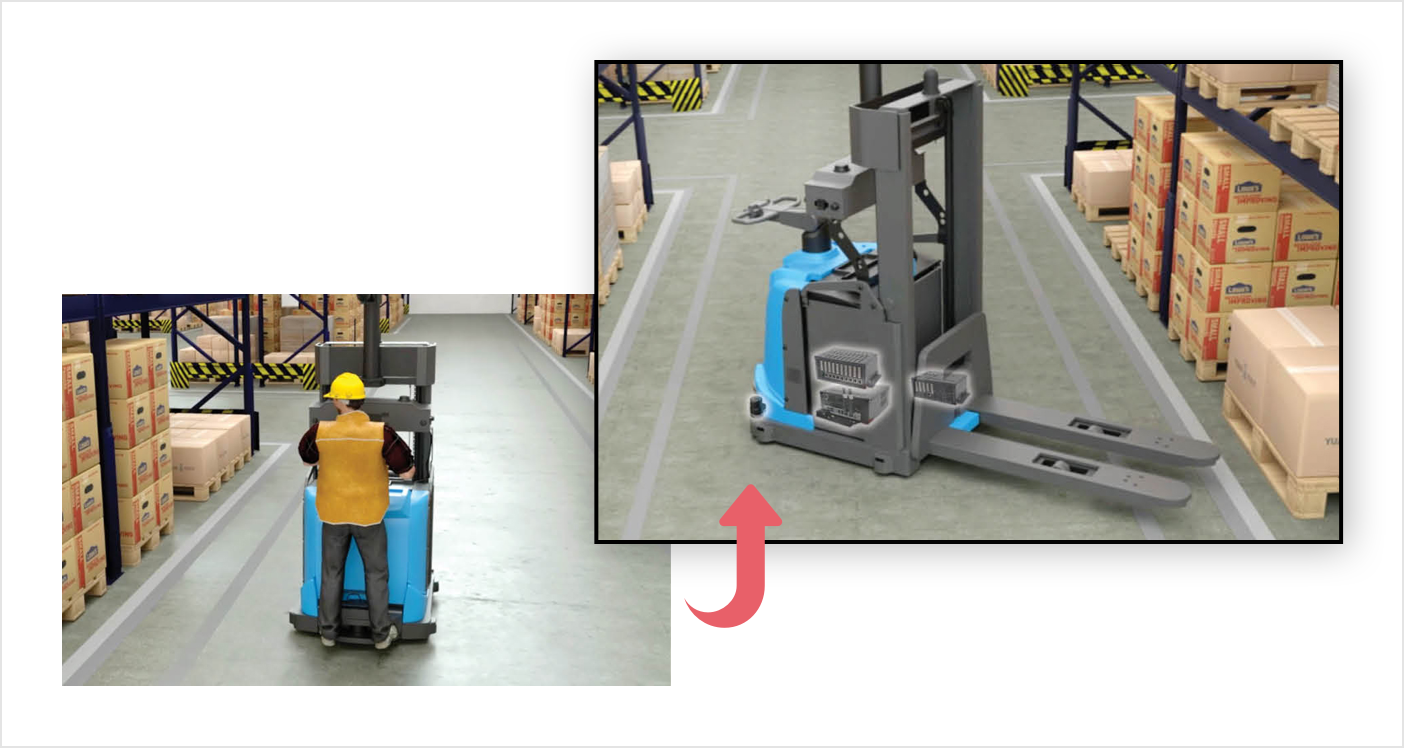
Retrofit existing AGV equipment into autonomous AMR
Commercial Equipment Robotization Package
Optimal 3D laser sensor for autonomous mobile robots
It is designed to scan the surrounding environment and measure the distance to surrounding objects based on the single-channel (905 mm) ToF (time-of-flight) principle. YUJIN LiDAR's scanning solution is used to create accurate, high-density 3D models of indoor spaces, and thanks to its in-house development technology and manufacturing methods, YUJIN LiDAR provides high performance at a reasonable price. In addition, its main features include a wide field of view, compact size, ROS compatibility, waterproofing (IP67), and eye protection (Class 1).
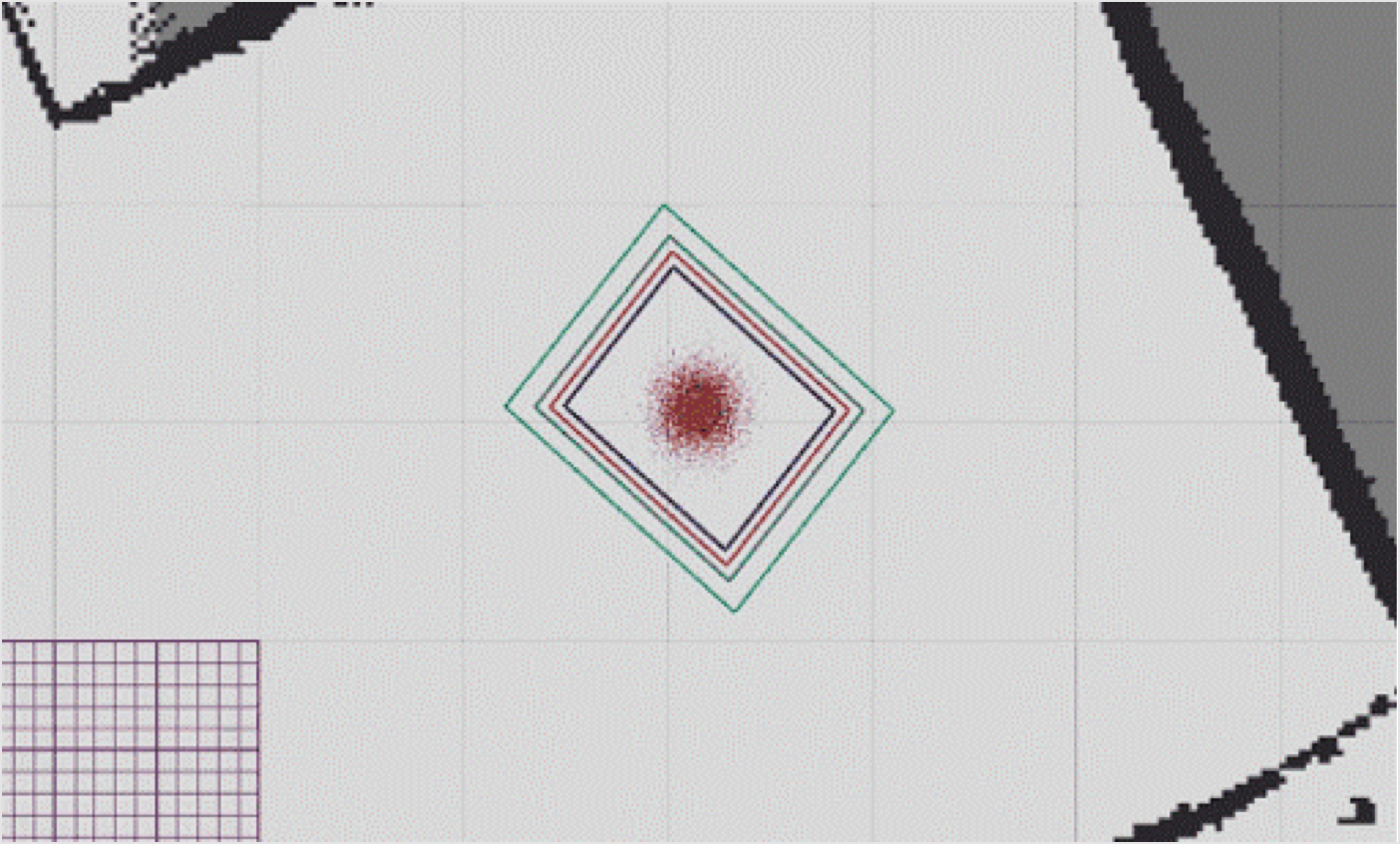
YUJIN SLAM (Simultaneous Localization and Mapping) is Yujin Robot's solution, which is integrated into the board and allows the robot to accurately map in different environments, and at the same time check the robot's correct position on the map.

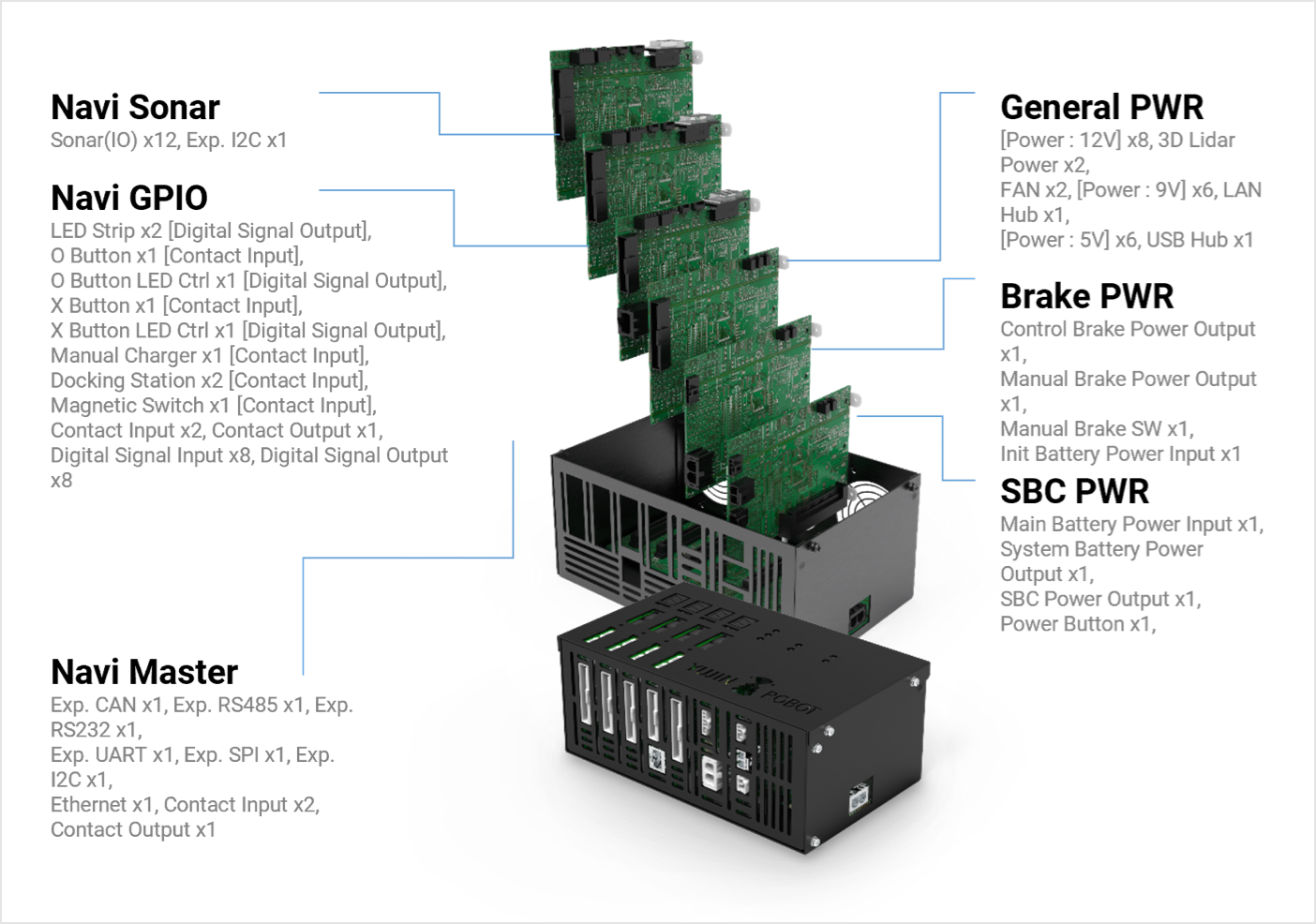
YUJIN Navigation Controller detects obstacles in the working environment and suggests the optimal route for the robot to move accurately to the target location. A variety of sensors connected to the controller guide you to obtain precise and accurate information about your working environment.
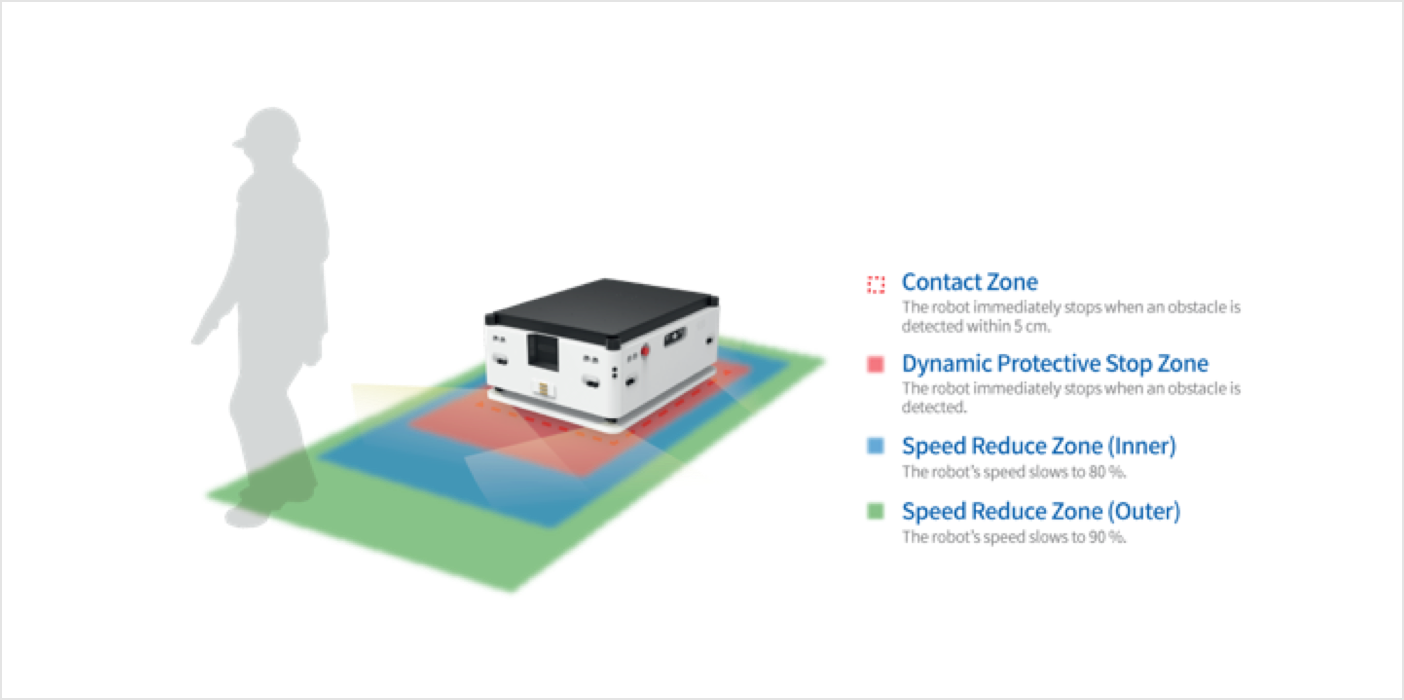
YUJIN Safety Controller has obtained ISO13482 international standard certification and provides information on a safe working environment. Ensure a safe distance to prevent the robot from being exposed to dangerous situations, such as colliding with workers during operation. Equipped with YUJIN Safety Controller, the robot checks and detects the surrounding distance on its own in the safe zone in real time.
Check out more information about our AMR products for healthcare, factory and warehouse applications
Check out the videos of our application in our YouTube channel
Product brochure is available for download.
Standard AMR

Max. Payload: 180 kg
Operating Speed: 1.0 m/s
Loading Surface Dimension (L x W): Max. 646 x 441 mm (25.43" x 17.36")
Driving Method: Differential

Max. Payload: 250 kg
Operating Speed: 1.0 m/s
Loading Surface Dimension (L x W): Max. 840 x 640 mm (33.07" X 25.19")
Driving Method: Differential

Max. Payload: 500 kg
Operating Speed: 1.0 m/s
Loading Surface Dimension (L x W): Max. 1222 x 822 mm (43.30" x 30.31")
Driving Method: Differential

Max. Payload: 1000 / 1500 kg
Operating Speed: 1.0 m/s
Loading Surface Dimension (L x W): Max. 1222 x 822 mm (48.11" X 32.36")
Driving Method: Differential
-2.png)
Max. Payload: 200 kg
Operating Speed: 1.0 m/s
Loading Surface Dimension (L x W): Max. 897 x 697 mm (35.31" x 26.73")
Driving Method: Omni Directional

 Newsletter Subscription
Newsletter Subscription










