












The world of industrial robots has come a long way since the late 1950s when the first industrial robot, Unimate, took its place on the General Motors assembly line. Today, it’s commonplace to find robots of all types working alongside humans in factories, warehouses, hospitals and more. As robot capabilities have advanced from the one-armed, hydraulic-powered Unimate, the safety considerations that govern robots in the workplace have evolved as well.
Evolving Standards for Robot Safety
Throughout much of the latter decades of the 20th century, robots remained stationery. Their operations and abilities grew, but they could be confined behind cages or cordoned off, away from humans. Their role was to take on the dull, dirty and dangerous jobs, easing the load for human workers. The human’s job was to get out of the way.
In 1987, the Occupational Safety and Health Administration released its Guidelines for Robotics Safety. In the introduction, the document includes the following description of how industrial robots work:
“A robot performs its tasks in a physical area known as the robot operating work envelope. This work envelope is the volume swept by all possible programmable robot movements.”
At the time, most robot injuries happened because a human violated the work envelope and got in the way of a powerful robot arm. The appropriate safety measures as outlined in the document included fences and barriers to keep the robot separate from human workers while it was operating.
The International Federation of Robotics reports there are more than 310,000 industrial robots working in the United States, and many fall into the category of stationery robots. However, an increasing number of workplace robots are on the move — literally.
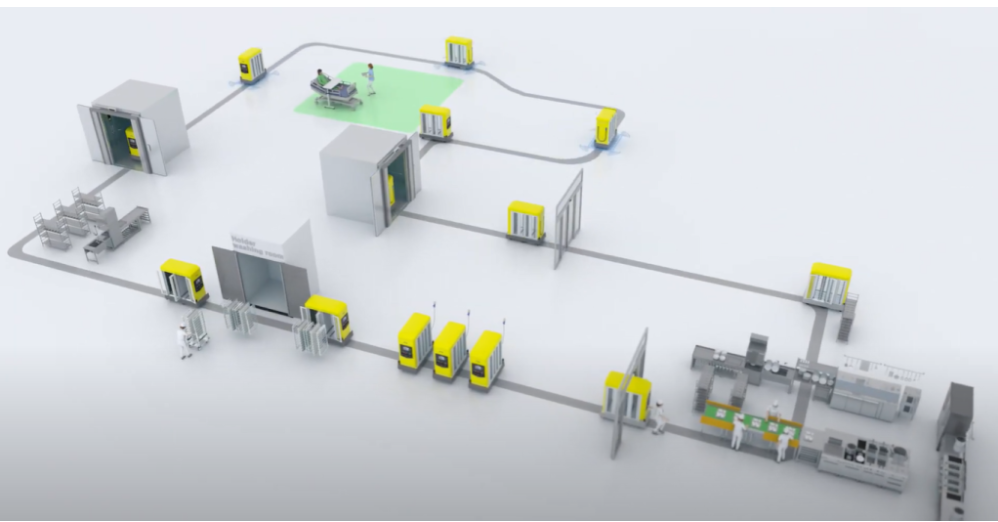
The last decade in particular has seen rapid growth in automated guided vehicles (AGV) and autonomous mobile robots (AMR). These robots are designed to work among and even with humans in manufacturing, healthcare, retail transportation and more.
“Control technologies for traditional industrial robots that keep workers physically away from operating robots using cages and other engineering controls are obsolete for the new types of robots,” notes the National Institute for Occupational Safety and Health. “Risk assessment methods and control strategies must be developed and tested for these new types of robots.”

In response to safety concerns, NIOSH established the Center for Occupational Robotics Research to “address the safety of today’s workers who use, wear, or work near robots.”
One way robot manufacturers and NIOSH are addressing safety concerns is by adhering to industry standards — which are also continually evolving to include AMRs. The Association for Advancing Automation (A3) recently updated its Global Robotics Standard to address autonomous and collaborative robots.
“The rapidly developing capabilities of mobile robots will make industrial mobile robots (IMRs) and fleets (IMRFs) an increasingly common type of robot application in the future. In order for this advancement in productivity to succeed, the safety of human workers around mobile robot applications must be ensured.”

Robot Safety Sensors
While initial guidelines addressed how to keep humans away from robots, both A3 and NIOSH guidelines now include standards on how to keep robots away from humans as they move throughout a shared space. One of the primary ways AMR manufacturers are ensuring safety is through the use of exteroceptive sensors. These sensors allow a robot to discern what is going on in the external environment and react appropriately — they act like the eyes and ears of the AGV or AMR as it performs tasks. Robot sensors can take on many forms including touch sensors that give the robot the ability to stop if it comes in contact with something and range sensors that allow robots to detect and avoid obstacles without making contact.
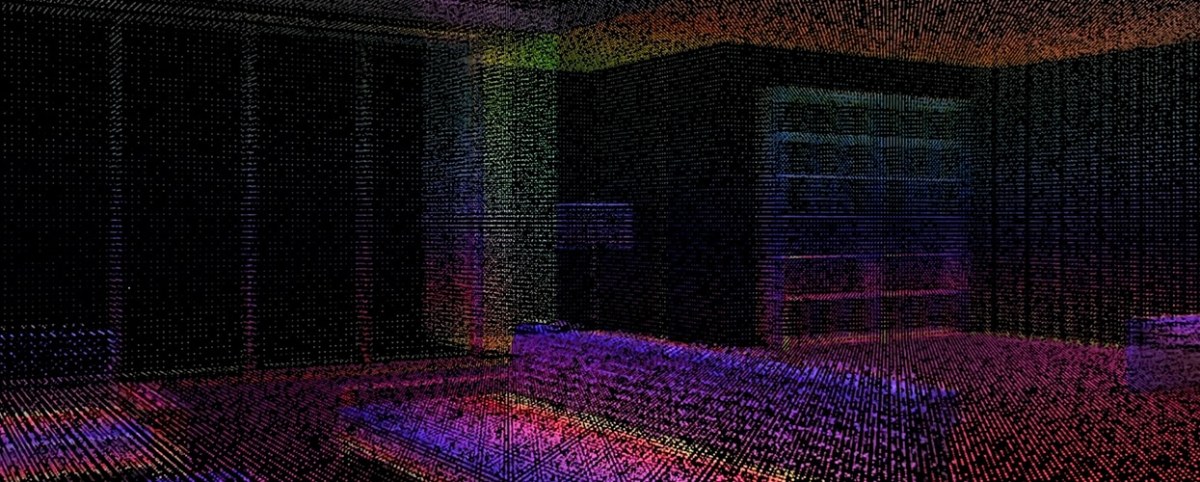
One of the most powerful in the former category is LiDar sensors. LiDar stands for Light Detection and Ranging, and is widely used by AMRs to locate and identify obstacles and track their movement. LiDar uses laser pulses to detect an object and estimate its size and distance from the robot. It operates in a similar way to RADAR — which uses radio waves instead of light — but has proven to be a faster and more accurate tool for use in AMRs. This is especially true in environments that are smaller or have less predictable layouts.
One of the latest developments in LiDar comes from Yujin Robot. The company created its Yujin 3D LiDar optimized for mapping, object detection, navigation and other robotics applications — particularly in AMRs. Yujin 3D LiDar has four selectable scanning modes that allow for 360-degree horizontal and 80-degree vertical field of view (FOV) coverage.
When used in combination with SLAM and navigation technology, LiDar gives autonomous mobile robots the ability to move safely through various environments, making adjustments to avoid obstacles and workers.
Working Safely Together
There’s no question that robots in the workplace have contributed to productivity and even safety. But as AMRs and collaborative robots become more of the norm in warehouses, factories and hospitals around the globe, it is even more crucial for robots to come equipped with the tools needed to keep human workers safe while on the job.




 Newsletter Subscription
Newsletter Subscription

